When starting a robotics project, a vehicle, or any other mobile device, one of the first decisions will be choosing the types of actuators we are going to use.
An actuator is the generic name we use for any device capable of performing actions in the physical world that we can control from an automaton or processor like Arduino. In particular, we use the name actuator for devices that are capable of generating movement.
Selecting the right actuator for our project is a complicated task because we have a wide range of options (DC motors, servos, stepper motors, brushless motors…) each of which has its advantages and disadvantages.
Explaining all actuators in a single post would be too long, so in this post we will see the factors and criteria that condition the choice of one or the other.
In the next post we will see the characteristics and operation of the main types of rotary motors, and in the last post of the series other types of available actuators.
Factors for Choosing a Motor or Actuator
In general, when selecting an actuator we must consider the mechanical and electrical characteristics, the control we will have available, and of course, the price.
However, it is good to be clear that the characteristics of one motor are not better or worse than those of another. For example, having a low speed or torque may seem bad at first, but it doesn’t necessarily have to be.
Imagine we are making a project to rotate a billboard. Making it spin at 12000 rpm will probably not achieve the effect we are looking for. Or imagine we want a motor with low torque so that if someone accidentally puts a finger in, the motor stops without causing damage.
The same happens with robots and vehicles. It doesn’t matter if the wheels can spin at high speed if they stop as soon as they touch the ground. Or if the robot has enough torque to climb a wall, but in return moves at a snail’s pace.
Once this is refreshed, we finally move on to break down each of the factors.
Mechanical Characteristics
Mechanical characteristics include speed, the force or torque it can exert, precision, and the maximum load it can support.
Electrical Characteristics
Electrical characteristics include power, voltage, and rated current. This will condition the size of components, the conductor cross-section, and battery capacity.
Rated Voltage
This is the voltage at which we must power the motor for correct operation, measured in Volts. Frequently it is also the maximum voltage at which we can power the device without damaging it.
Sometimes the rated voltage is a range, rather than a single value. The operating point will vary depending on the voltage we apply.
Common values for motors and actuators are 6V, 12V, and 24V.
Rated Current
This is the current intensity we must supply to the motor for correct operation, measured in Amperes. Similarly, the rated current often coincides with the maximum current at which we can power the device without damaging it.
Some actuators have a rated current lower than what would flow according to Ohm’s law based on their rated voltage and resistance. For this reason, the controller must have a current limiting device.
There are motors in a wide range of rated currents, from a few mA to several tens in the case of large motors.
Electrical Power
Electrical power is the energy per unit time absorbed by the actuator from the power supply, measured in Watts (W), and has the following expression,
At the same time, mechanical power is related to electrical power according to,
Where μ is the overall efficiency of the actuator, which encompasses mechanical losses due to friction, and electrical losses due to copper losses from Joule effect, losses from induced currents, losses from magnetic hysteresis, and losses from magnetic flux leakage.
On the other hand, the electrical charge consumed by the motor is
The unit for energy is Joules (J), with common units being Ampere-hour (Ah) and micro Ampere-hour (mAh).
This electrical charge is especially relevant when powering the actuator from batteries, to determine the operating time with a charge.
Control Characteristics
In addition to mechanical and electrical criteria, a factor that greatly conditions the choice of actuator (and is frequently the most overlooked) is the control we will have available. In general, in a robot or vehicle we are interested in three types of control:
- Speed control, knowing at what speed the vehicle is moving.
- Position control, knowing at what point our vehicle is.
- Orientation control, knowing the direction the vehicle is pointing.
In principle, forget about having total control over any of these variables. The real world is not perfect, wheels slip, motors have non-linear responses, loads are not balanced, components are not identical and perfect, sensors have drift… All these defects mean that, in general, we cannot have total and absolute precision.
Speed control is, in general, the easiest to measure or at least estimate. In many actuators we act directly on their speed. On the other hand, if we know the actuator’s position, we can obtain its speed simply by deriving (dividing) with respect to time, and calculate its average speed.
The vehicle’s position is the most difficult to know. Some actuators allow good position control, but this does not guarantee knowing the robot’s real position. In general, additional sensors will have to be installed, such as photointterrupters or limit switches, which allow us to position the actuator absolutely.
We have other types of sensors that help us determine a robot’s position, such as ultrasonic or infrared distance sensors. GPS allows us to obtain the real position, but it has an accuracy of 0.5 meters, which is too high for most vehicles. Other options include vision systems, or triangulation of radio frequency beacons.
On the other hand, forget about obtaining the vehicle’s position by integrating speed (multiplying speed x time). Errors in speed measurement accumulate, and in the end you will always have a drift in position. Use it only as a last resort, or as interpolation between positions given by sensors.
Finally, the robot’s orientation is almost impossible to know through actuator control, for the same reasons as position. Fortunately, in most cases we can use magnetic compasses and gyroscopes to determine the vehicle’s orientation with a high degree of precision.
Surprised that you can’t have total control of a robot’s position, speed, and orientation? You’ll be even more surprised that the best solution is not to aspire to total control.
In nature, humans and other animals do not need total precision, they simply need an approximation and to respond to environmental stimuli. Your robot should be designed with the same philosophy.
Adding an Encoder
The most widespread solution to improve the control of our actuators is to add an encoder. An encoder is a device that allows registering the actuator’s position, which means having total control of position and speed.
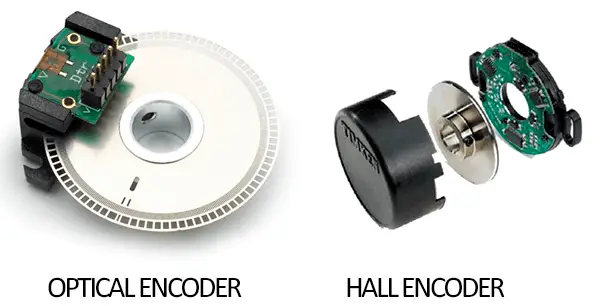
The most common encoders are optical or magnetic. In optical encoders, a slotted or transparent disk with opaque areas is coupled to the shaft. A photointterrupter detects the interruption of a light beam as the disk passes. In magnetic sensors, one or several magnets are coupled to the actuator, and a Hall sensor is used to detect the magnet passing by the sensor.
Encoders are common, and almost inevitable, components in electronics and robotics projects, both in the hobbyist and industrial fields.
In both types of sensors, in the intervals where we do not detect we are “blind”, so the finer the step (finer slots, or more magnets) the better precision we will have.
However, although they greatly improve control capability, they do not make us immune to, for example, wheel slippage. Remember, knowing how much a motor has rotated does not mean knowing the vehicle’s position.
Conclusion
All these factors are related and the design must be approached globally. For example, increasing the size of a robot means greater weight, which requires larger motors and components, which require greater consumption, which means larger batteries, which in turn imply an increase in weight.
That is, as we increase the power of a robot or vehicle, all components have to grow accordingly and the price skyrockets quickly.
Selecting the motor or actuator that best suits the particular conditions of our design and, of course, keeping the price as low as possible, is not a simple task and there is no single possible solution.
For this, it is necessary to know the characteristics, operation, advantages, and disadvantages of each type of actuator. For this reason, in the next post we will see the different types of rotary motors, and in the following one other types of actuators, in order to select the ideal actuator for our Arduino projects.
