OpenRobot is an Arduino Nano-based PCB that allows you to create a wide variety of projects and robots, especially suitable for teaching.
Once assembled, OpenRobot allows you to mount an almost unlimited number of projects without the need for soldering, wiring, or using a breadboard. You simply need to add or change the modules you mount.
OpenRobot is compatible with a huge number of modules, thanks to its multiple digital outputs, I2C, and UART at 3.3V and 5V. It is also compatible with various DC-DC converters, different IMUs, including the popular MPU6050, MPU9050/9250 and L3GD20, and ultrasonic or analog distance sensors.
The OpenRobot design is intended for you to adapt it to your use simply by changing modules. Don’t need the motor driver? Don’t mount it! Don’t want the environmental sensor? Prefer an Oled display? Change it! Want to add more servos with an I2C expander? Play and enjoy the combinations.
You don’t even need to mount the entire board with all its pins and headers. You can mount only the part you will need for your project. Or mount it complete and discover the possibilities!
What can I do with OpenRobot?
Almost any Arduino project you can imagine! Some of them are:
- Robots with DC motors, such as obstacle detectors, maze runners, line followers, self-balancers…
- Robots with servos, such as a 2-DOF turret, a light follower, a 6-DOF arm
- Projects with high-power Mosfet outputs, such as lights, electromagnets, water pumps, Peltier plates, thermistors…
- Projects with Bluetooth (HC-05/HC-06), such as communication with PC or Smartphone, beacons…
- Projects with WiFi (ESP01), controlled via Web, MQTT, dataloggers, IoT…
- Environmental stations measuring temperature, humidity, and atmospheric pressure (BME280)
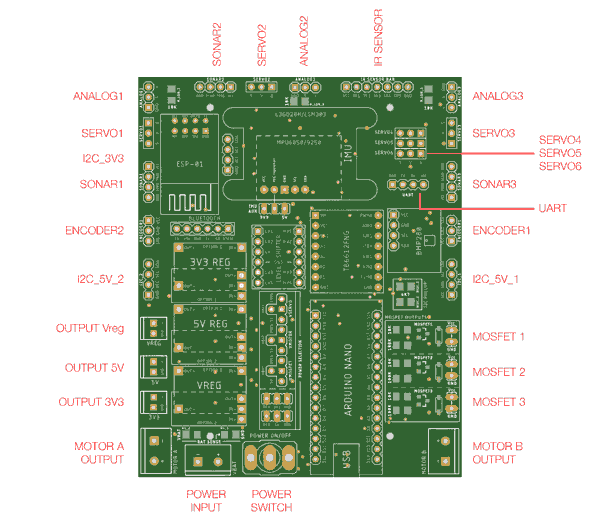
Connections
OpenRobot has a huge number of available outputs, allowing it to be adapted to a wide variety of projects.
- 2x DC Motor
- 2x Encoder
- Auxiliary outputs of 3.3V, 5V, Vreg
- 2x I2C 5V + 1x I2C 3.3V
- 3x Ultrasonic distance sensor
- 3x Analog inputs (with optional Pull-up resistor)
- 6x Servo
- 5x Infrared sensors
- 3x High-power Mosfet
But, of course, you can use any of the outputs (within the Arduino pinout) as a GPIO pin for your project.
Pinout
Of course, not all components, outputs, and combinations are available at the same time, due to the number of pins available on Arduino. Here is the equivalence between each Arduino pin and the OpenRobot outputs.
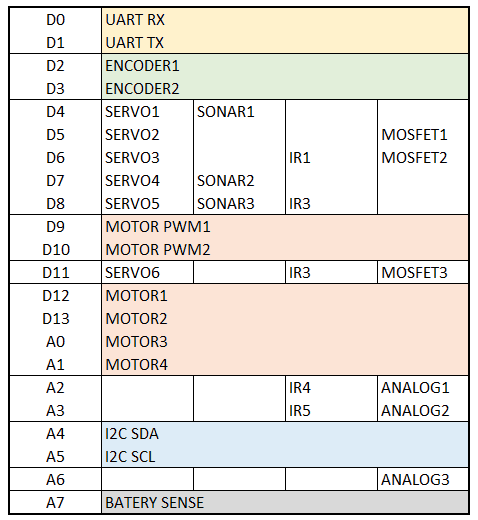
You will need to choose which components and outputs are necessary for your project. But the possibilities are almost limitless!
Power Supply
The power supply is one of the most important parts of any project and, thus, it is also one of the most important parts of OpenRobot. OpenRobot allows for flexible but powerful management of power options for your project.
- You can mount up to 3 DC converters. (for 5V, 3.3V, + an additional Vreg for an arbitrary voltage)
- Selectors via jumpers to decide which components (DC Motors, servo, Mosfet) are powered by each voltage.
- It is possible to bypass the DC converters and power directly from the Arduino regulator (only in the case of projects with low power consumption requirements)
- Battery voltage measurement (optional)
- Single connection terminal block for power supply from a power source or battery
- On/off switch
Download the files
More information, documentation, and all project files on GitHub. 
