¿Qué es un motor 28BYJ-48 y un ULN2003?
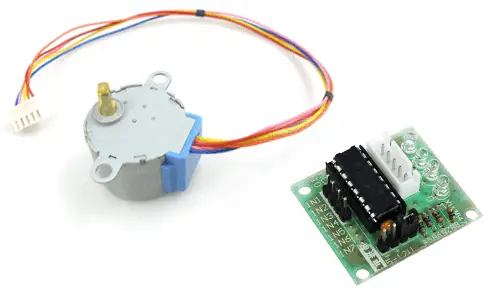
El 28BYJ-48 es un pequeño motor paso a paso unipolar de bajo precio. Las características eléctricas del 28BYJ-48 son modestas, pero incorpora un reductor integrado que lo convierte en un componente mucho más útil e interesante.
El 28BYJ-48 tiene un paso de 5.625 grados (64 pasos por vuelta). El reductor interno tiene una relación de 1/64. Combinados, la precisión total es de 4096 pasos por vuelta, equivalente a un paso de 0.088º, que es una precisión muy elevada.
En realidad la relación del reductor no es exactamente 1/64 por lo que el número de pasos es 4076 por vuelta (equivalente a un reductor de 1/63.6875)
La alimentación del motor es 5V o 12V según modelo, siendo más habitual el modelo de 5V. Físicamente ambos modelos son idénticos, por lo que para saber la tensión nominal deberemos mirar la etiqueta del motor.
El 28BYJ-48 tiene un par máximo tras el reductor de 3N•cm (0.3Kgf•cm). La frecuencia máxima es de 100Hz, lo que supone unos 40 segundos por vuelta, o equivalentemente una velocidad de giro máxima en torno a 1.5 rpm.
La resistencia y el consumo eléctrico varían con el modelo de 28BYJ-48. En los modelos de 5V es de 60 Ohm, lo que supone un consumo de 83mA. Los modelos de 12V tienen resistencias de 130-380 Ohm, y consumos de 71 a 32mA.
Para el control podemos emplear una placa con integrado ULN2003. Normalmente el 28BYJ-48 se suministra con esta placa, y ambos dispositivos disponen clemas para una conexión sencilla.
El 28BYJ-48 es un motor ampliamente utilizado en aplicaciones industriales, como el control de válvulas hidráulicas y neumáticas.
En el campo de los hobbies, podemos usar el 28BYJ-48 para hacer pequeños robots articulados, brazos robóticos, posicionar sensores, o girar la mesa de un escáner.
PRECIO
El 28BYJ-48 es un motor muy barato. Podemos encontrar 28BYJ-48 por unos 1.2€ en vendedores internacionales de eBay o AliExpress.
Normalmente querremos adquirirlo junto con el controlador ULN2003. Podemos encontrar kits con ambos componentes de forma conjunta por 1.60€.
¿COMO FUNCIONA EL 28BYJ-48 CON ULN2003?
Para el control del 28BYJ-48 vamos a usar una placa con el integrado ULN2003. El ULN2003 es una agrupación de 7 Par Darlington de los cuales usaremos 4, uno por cada fase del motor paso a paso.
Un par Darlington es un dispositivo que nos permite suministrar una corriente superior a las que podríamos usando las salidas de Arduino directamente.
Más información en
El 28BYJ-48 es un motor unipolar, por lo que no necesitamos invertir la corriente que atraviesa las bobinas para hacerlo funcionar. Por tanto, no necesitamos un controlador complicado como el A4988 o el DRV8825, ni siquiera un simple puente-H como el L298N.
Aplicando un control todo o nada, es decir, encendiendo por completo o apagando por completo una bobina, únicamente tenemos que activar las bobinas en la secuencia correcta.
Existen varias secuencias posibles, y a continuación vamos a ver las tres más empleadas.
Secuencia 1-fase
En secuencia de 1-fase encendemos una única bobina cada vez.
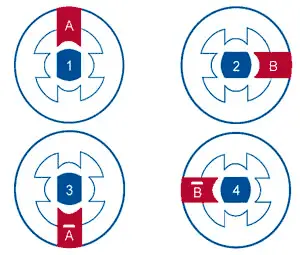
Llevando esta secuencia de encendido a una tabla, que posteriormente usaremos para el código, la secuencia quedaría de la siguiente forma,
| Paso | A | B | A’ | B’ |
|---|---|---|---|---|
| 1 | ON | OFF | OFF | OFF |
| 2 | OFF | ON | OFF | OFF |
| 3 | OFF | OFF | ON | OFF |
| 4 | OFF | OFF | OFF | ON |
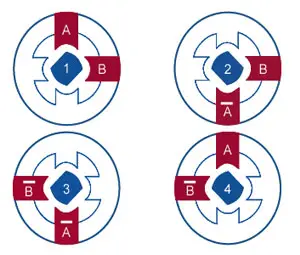
Secuencia 2-fases
En la secuencia en 2-fases encendemos dos bobinas correlativas en cada fase. Al hacer trabajar dos bobinas simultáneamente en cada paso el campo magnético generado es superior (un 41% más) por lo que el motor tiene más par y, en general, presenta un mejor comportamiento. Como punto negativo, aumentamos el consumo energético al doble.
Que expresado en forma de tabla resulta,
| Paso | A | B | A’ | B’ |
|---|---|---|---|---|
| 1 | ON | ON | OFF | OFF |
| 2 | OFF | ON | ON | OFF |
| 3 | OFF | OFF | ON | ON |
| 4 | ON | OFF | OFF | ON |
Secuencia medio pasos
La última secuencia que vamos a ver es la secuencia en medio paso (half-step). Aquí encendemos alternativamente uno y dos bobinas.
Con esta secuencia conseguimos una precisión de la mitad del paso. El par desarrollado varía ya que en algunos pasos activamos dos bobinas y en otras solo una, pero a la vez el giro se encuentra más “guiado”, por lo que en general ambos efectos se compensan y el funcionamiento es bueno, salvo en aplicaciones donde estemos muy al límite del par máximo.
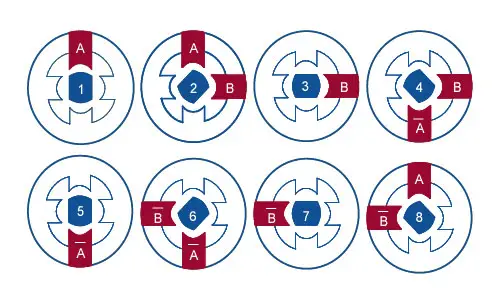
Expresando la secuencia en forma de tabla resulta
| Medio-paso | A | B | A’ | B’ |
|---|---|---|---|---|
| 1 | ON | OFF | OFF | OFF |
| 2 | ON | ON | OFF | OFF |
| 3 | OFF | ON | OFF | OFF |
| 4 | OFF | ON | ON | OFF |
| 5 | OFF | OFF | ON | OFF |
| 6 | OFF | OFF | ON | ON |
| 7 | OFF | OFF | OFF | ON |
| 8 | ON | OFF | OFF | ON |
Esquema de montaje
La conexión del 28BYJ-48 a Arduino a través del módulo ULN2003 es bastante sencilla.
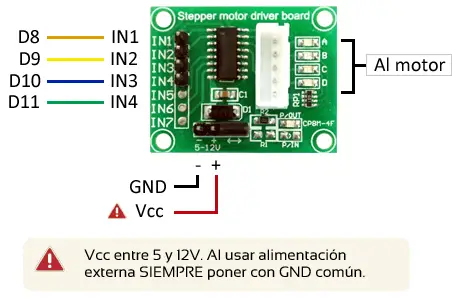
En primer lugar, conectamos el 28BYJ-48 a la placa con el integrado ULN2003 con la clema de conexión incorporada. Los terminales solo encajan en una posición, por lo que no hay riesgo de conectarlo incorrectamente.
Por otro lado, alimentamos el módulo aplicando la tensión de alimentación entre Vcc y GND del módulo. Existen modelos de 28BYJ-48 de tensiones nominales 5 o 12V. Deberéis aplicar la tensión que corresponde con vuestro motor.
En el caso de motores de tensión nominal 5V, podemos alimentar directamente desde la salida de 5V de Arduino.
No exceder la tensión de alimentación de vuestro modelo de 28BYJ-48, o lo dañaréis permanente.
Finalmente, conectamos los pines IN1, IN2, IN3 e IN4 a cuatro salidas digitales de Arduino. Al activar cada una de las señales activaremos el par Darlington correspondiente, provocando el encendido de la bobina.
La conexión, vista desde Arduino, quedaría de la siguiente manera,
EJEMPLOS DE CODIGO
Hacer funcionar un motor paso unipolar no es difícil, simplemente tenemos que emplear las secuencias que hemos visto correctamente.
Sin embargo, sí es un código en el que conviene que seamos (al menos) medianamente organizados, o puede empezar a crecer en número de líneas rápidamente, haciéndolo más lento, más difícil de usar y de mantener.
Por un lado, dado que vamos a que vamos a usar frecuentemente el código para cambiar de paso en uno u otro sentido, conviene que lo aislemos en dos funciones independientes, clockwise() y anticlockwise()
Por otro lado, vamos a almacenar la secuencia de encendido en una tabla de lookup. En el código aparecen las tres secuencias, simplemente descomentar la que queráis emplear. Por defecto está descomentada la de medio-paso, que es la recomendada por el fabricante.
Finalmente, tenemos una función setOutput() que fija la salida al motor en un paso determinado de la secuencia.
//definicion de pins
const int motorPin1 = 8; // 28BYJ48 In1
const int motorPin2 = 9; // 28BYJ48 In2
const int motorPin3 = 10; // 28BYJ48 In3
const int motorPin4 = 11; // 28BYJ48 In4
//definicion variables
int motorSpeed = 1200; //variable para fijar la velocidad
int stepCounter = 0; // contador para los pasos
int stepsPerRev = 4076; // pasos para una vuelta completa
//tablas con la secuencia de encendido (descomentar la que necesiteis)
//secuencia 1-fase
//const int numSteps = 4;
//const int stepsLookup[4] = { B1000, B0100, B0010, B0001 };
//secuencia 2-fases
//const int numSteps = 4;
//const int stepsLookup[4] = { B1100, B0110, B0011, B1001 };
//secuencia media fase
const int numSteps = 8;
const int stepsLookup[8] = { B1000, B1100, B0100, B0110, B0010, B0011, B0001, B1001 };
void setup()
{
//declarar pines como salida
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop()
{
for (int i = 0; i < stepsPerRev * 2; i++)
{
clockwise();
delayMicroseconds(motorSpeed);
}
for (int i = 0; i < stepsPerRev * 2; i++)
{
anticlockwise();
delayMicroseconds(motorSpeed);
}
delay(1000);
}
void clockwise()
{
stepCounter++;
if (stepCounter >= numSteps) stepCounter = 0;
setOutput(stepCounter);
}
void anticlockwise()
{
stepCounter--;
if (stepCounter < 0) stepCounter = numSteps - 1;
setOutput(stepCounter);
}
void setOutput(int step)
{
digitalWrite(motorPin1, bitRead(stepsLookup[step], 0));
digitalWrite(motorPin2, bitRead(stepsLookup[step], 1));
digitalWrite(motorPin3, bitRead(stepsLookup[step], 2));
digitalWrite(motorPin4, bitRead(stepsLookup[step], 3));
}
Descarga el código
Todo el código de esta entrada está disponible para su descarga en Github. 
