OpenRobot es una PCB basada en Arduino Nano que permite realizar una gran cantidad de proyectos y robots, especialmente adecuada para la docencia.
Una vez ensamblada, OpenRobot permite montar una casi ilimitada cantidad de proyectos sin necesidad de soldar, cablear, o emplear una protoboard. Simplemente hay que añadir o cambiar los módulos que montamos.
OpenRobot es compatible con una enorme cantidad de módulos, gracias a sus múltiples salidas digitales, I2C y UART a 3V3 y 5V. También es compatible con distintos conversores DC-DC, y diferentes IMUs, incluidos los populares MPU6050, MPU9050/9250 y L3GD20, y sensores de distancia ultrasónicos o analógicos).
El diseño de OpenRobot está pensado para que lo adaptes a tu uso simplemente cambiando módulos. ¿No necesitas el driver de motores? ¡No lo montes! ¿No quieres el sensor ambiental? ¿Prefieres una pantalla Oled? ¡Cámbialo! ¿Quieres añadir más servos con un expansor I2C? Juega y disfruta con las combinaciones.
Ni siquiera es necesario que montes la placa entera, con todos sus pines y headers. Puedes montar únicamente la parte que vayas a necesitar para tu proyecto. ¡O móntala completa y descubre las posibilidades!
¿Qué puedo hacer con OpenRobot?
¡Casi cualquier proyecto de Arduino que puedas imaginar! Algunos de ellos son,
- Robots con motores DC, como detectores de obstáculos, recorredores de laberintos, seguidores de lineas, auto-balanceadores…
- Robots con servos, como una torreta de 2-DOF, un seguidor de luz, un brazo de 6-DOF
- Proyectos con salidas de alta potencia por Mosfet, como luces, electroimanes, bombas de agua, placas peltier, termoresistencias…
- Proyectos con Bluetooth (HC-05/HC-06), como comunicación con PC o Smartphone, beacons…
- Proyectos con WiFi (ESP01), controlados por Web, MQTTT, dataloggers, IoT…
- Estaciones ambientales con medición de temperatura, humedad, y presión atmosférica (BME280)
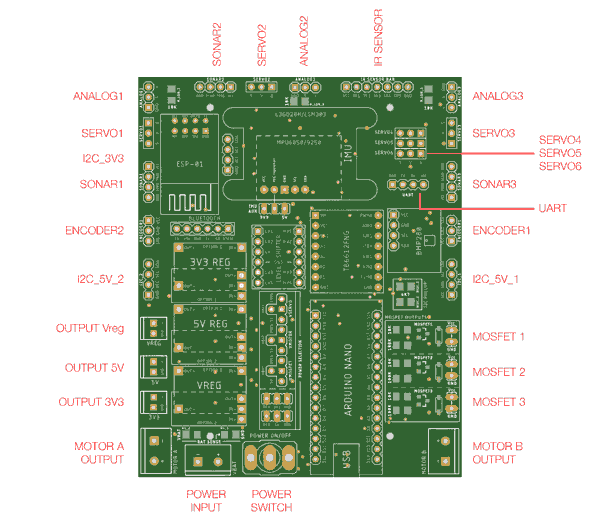
Conexiones
OpenRobot dispone de una enorme cantidad de salidas disponibles, lo que permite adaptarlo a una gran multitud de proyectos.
- 2x DC Motor
- 2x Encoder
- Salidas auxiliares de 3V3, 5V, Vreg
- 2x I2C 5V + 1x I2C 3V3
- 3x Sensor distancia ultrasónico
- 3x Entradas analógicas (con resistencia Pull-up opcional)
- 6x Servo
- 5x Sensores infrarrojos
- 3x Mosfet alta potencia
Pero, por supuesto, puedes usar cualquier de las salidas (dentro del pinout de Arduino) como una pin GPIO para tu proyecto .
Pinout
Por supuesto, no todos los componentes, salidas y combinaciones están disponibles al mismo tiempo, debido a la numero de pins disponibles en Arduino. Aquí tenéis la equivalencia entre cada pin de Arduino y las salidas de OpenRobot.
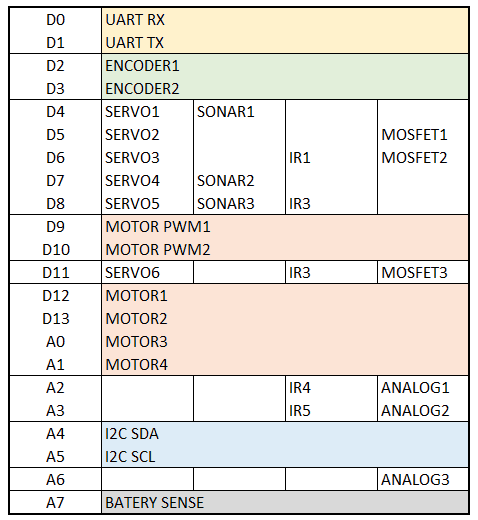
Deberás elegir cuales de los componentes y salidas son necesarias para tu proyecto. ¡Pero las posibilidades son casi ilimitadas!
Alimentación
La alimentación es una de las partes más importantes de cualquier proyecto y, así, también es una de las partes más importantes de OpenRobot. OpenRobot permite una gestión flexible pero potente de las opciones para alimentar tu proyecto.
- Puedes montar hasta 3 convertidores DC. (para 5V, 3V3, +una adicional Vreg para una tensión arbitrario)
- Selectores mediante jumpers para decidir que componentes (DC Motors, servo, Mosfet) se alimentan con cada tensión.
- Es posible hacer un by-pass a los convertidores DC y alimentar directamente desde el regulador de Arduino (sólo en el caso de proyectos con bajos requisitos de consumo)
- Medición de la tensión de batería (opcional)
- Clema de conexión única para alimentación desde fuente de alimentación o batería
- Interruptor de encendido y apagado
Descarga los ficheros
Más información, documentación y todos los ficheros del proyecto en GitHub. 
