En las dos entradas anteriores hemos visto los criterios a tener en cuenta para elegir un actuador o motor para usar en nuestros proyectos de Arduino, y los principales tipos de motores rotativos que que tenemos disponibles, con sus ventajas y desventajas.
Finalizando con con la guía de selección viendo los principales tipos de actuadores lineales disponibles, con su funcionamiento, características, ventajas y desventajas.
La explicación del funcionamiento de cada tipo de actuador será cuantitativa y sin ecuaciones, ya que cada entrar en detalles de cada uno de ellos daría para un capítulo de un libro de electrónica. El objetivo es exponer de forma sencilla cómo funcionan y sus ventajas y desventajas.
Electroimanes
Un electroimán es un dispositivo que permite atraer objetos ferromagnéticos, como el Fe y algunas de sus aleaciones.
Un electroimán está formado por una bobina arrollada en torno a un núcleo ferromagnético. Al aplicar una corriente a la bobina se genera un campo magnético en su interior, que genera una fuerza de atracción o repulsión sobre otros materiales.

El núcleo ferromagnético del electroimán aumenta la potencia del campo magnético, y reduce las pérdidas por dispersión.
Podemos usar un electroimán en nuestros proyectos para crear una pequeña grúa, o instalado en un brazo robótico para levantar objetos, o incluso para fijar un robot a una plancha metálica.
Actuadores magnéticos
Los actuadores magnéticos son similares a un electroimán, pero en el que el núcleo magnético es móvil. En el extremo frecuentemente se dispone de una pieza de plástico, por ejemplo, con una pequeña pinza.

Al hacer circular la corriente, el núcleo es atraído al interior del electroimán. Se dispone de un muelle que devuelve el pasador interno a su posición original cuando cesa la corriente.
Este tipo de actuadores magnéticos son muy usados. Son muy rápidos, pero tienen la desventaja de tener un recorrido pequeño.
Actuadores lineales
Los actuadores lineales están formados por un motor de corriente continua y un vástago accionado por un torillo sin fin, en el interior de un integrado compacto.
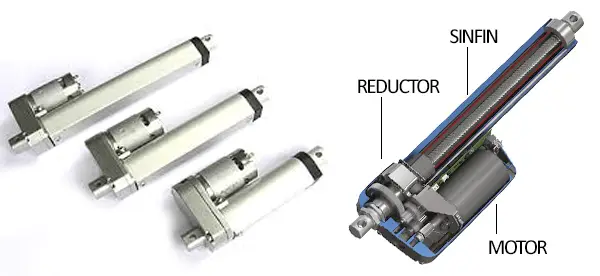
Este tipo de actuadores están disponibles en una gran variedad de longitudes, algunas de ellas muy largas. Son capaces de ejercer grandes fuerzas. El inconveniente es que son dispositivos bastante lentos.
Este tipo de actuadores lineales son capaces de mover grandes cargas, y son empleados, por ejemplo, para mecanizar toldos, elevar cargas.
Motores con tornillo sin fin y corredera
Similares a los anteriores, estos actuadores también están formados por un motor de corriente continua que acciona un corriente sin fin. Pero en este caso, se dispone de un elemento intermedio que se desplaza a lo largo del recorrido.
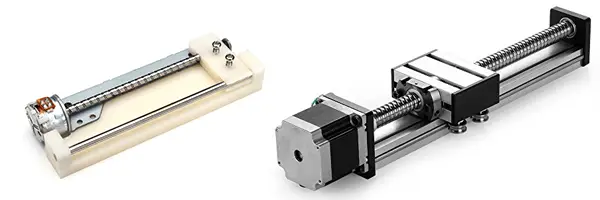
La corredera está registrada para que no gire con el tornillo. Este registro puede ser mediante una o varias guías, o un registro lateral a uno o a ambos lados.
En este caso, las características del actuador dependerá del motor empleado, pudiendo encontrar un motor DC o un motor de paso a paso.
Motores lineales
Los motores lineales funcionan de forma similar a un motor paso a paso, pero en lugar de hacer girar un rotor se desplaza una corredera de forma lineal.
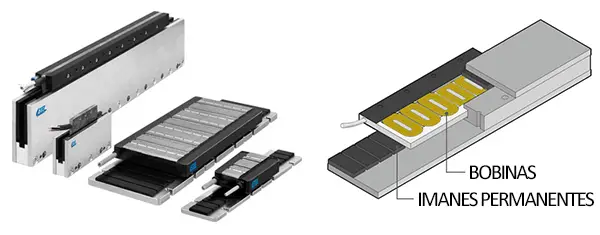
Están constituidos uno o varios raíles, a lo largo del cual se disponen imanes de polaridades alternas. En función de la tipología del motor, sobre, entre, o alrededor del rail se dispone de una corredera con bobinas controladas electrónicamente.
Al hacer variar la polaridad del campo magnético generado en las bobinas instaladas de la corredera.
Los motores lineales disponen de una alta velocidad, alto par, y alta precisión en los desplazamientos. Son empleados, por ejemplo, como sustitutos de las correderas de sin fin en máquinas de CNC industriales. También podéis encontrarlos en trenes de levitación magnética, e incluso en armamento avanzado como los railgun.
Sin embargo, los motores lineales tienen un precio prohibitivo para los proyectos domésticos. (Si tenéis alguna vez tenéis acceso a uno de estos podéis prestármelo, tengo ganas de jugar con uno
Hidráulica y neumática
Por supuesto, no podíamos hablar sobre actuadores sin hablar de dispositivos hidráulicos o neumáticos.
En estos sistemas un fluido (aceito o agua en hidráulicos, aire en neumáticos) se impulsa a lo largo de una serie de tubos y actuadores. El control se consigue actuando sobre las válvulas electrónicas ubicadas a lo largo de los conductos.
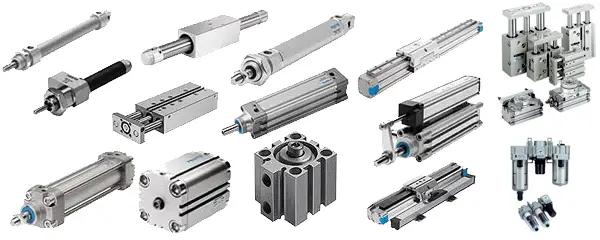
Los sistemas hidráulicos son capaces de ejercer grandes fuerzas con gran precisión. Son ampliamente utilizados, desde excavadoras, prensas, y todo tipo de automatizaciones.
Los sistemas neumáticos disponen de menor precisión y fuerza, ya que trabajan con gas y este es un fluido comprensible. Sin embargo, son más rápidos que los hidráulicos. También son ampliamente utilizados en la industria, para accionar herramientas, expulsar piezas, o realizar movimientos.
Sin embargo, los sistemas hidráulicos y neumáticos requieren, en general, el uso de equipamientos caros y voluminosos, por lo que están fuera del alcance de la mayoría de proyectos caseros. En serio, no intentéis usar estos sistemas si no tenéis muy claro lo que estáis haciendo.
Tabla de resumen
La información anterior se resume en la siguiente tabla. Por supuesto, dependerán del modelo particular de cada motor elegido, pero a grandes rasgos y a modo de resumen,
| Características | Control (*) | |
|---|---|---|
| Velocidad | Fuerza/Par | |
| Electroimán | – | ▲Alto |
| actuador magnético | ▲Alto | – Medio |
| actuador lineal (1) | ▼Bajo | ▲Alto |
| actuador lineal (2) | ▼Bajo | ▲Alto |
| Motor con tornillo sin fin y corredera (1) | ▼Bajo | ▲Alto |
| Motor con tornillo sin fin y corredera (2) | ▼Bajo | ▲Alto |
(*) Con encoder todos pasan a control absoluto de posición y velocidad (1) Accionados por motor DC (2) Accionados por motor paso a paso
Conclusiones
La mayoría de las dispositivos inventados por la humanidad para generar movimiento son máquinas rotativas. Para generar un movimiento lineal lo más frecuente es emplear un motor rotativo acompañado de algún mecanismo que convierta el movimiento en lineal.
El electroimán es una máquina sencilla que podemos emplear para atraer objetos ferromagnéticos, y levantar cargas. Pueden ejercer grandes fuerzas, pero actúan a pequeñas distancias. Además, no tenemos ningún tipo de control de velocidad ni posición.
Los actuadores electromagnéticos usan un electroimán para atraer un pequeño actuador. Son muy rápidos, pero la distancia de acción es muy pequeña y la fuerza que pueden ejercer suele es pequeña.
Lo actuadores lineales permiten desplazar ejercer grandes cargas y pueden llegar a tener recorridos bastante largos. A cambio, son mecanismos lentos. Pueden ser combinados con otro tipo de mecanismos (palancas, tijeras, rótulas, etc) para ampliar su rango de acción y velocidad, pero disminuyendo la fuerza ejercida. Pueden ser empleados, por ejemplo, para retraer un toldo, elevar plataformas, abrir una puerta, por ejemplo.
Otro dispositivo habitual es un motor con tornillo sin fin y corredera. En general tienen baja velocidad, alta precisión y alto par, aunque depende en gran medida de si emplea un motor DC o un motor paso a paso. Son muy frecuentes en aplicaciones lineales que requieren alta precisión, como máquinas CNC o impresoras 3D..
Finalmente, los motores lineales son raros y extremadamente caros. Por su parte, las soluciones hidráulicas y neumáticas sólo están recomendaras para profesionales e instaladores con experiencia ,ya que requieren de un gran número de elementos y medidas de seguridad.
